Prof. Deema Totah's Google Scholar Publication Record
Humanitarian Research Statement: The RAD lab does not work on weapons research nor engineering projects with military or defense objectives.
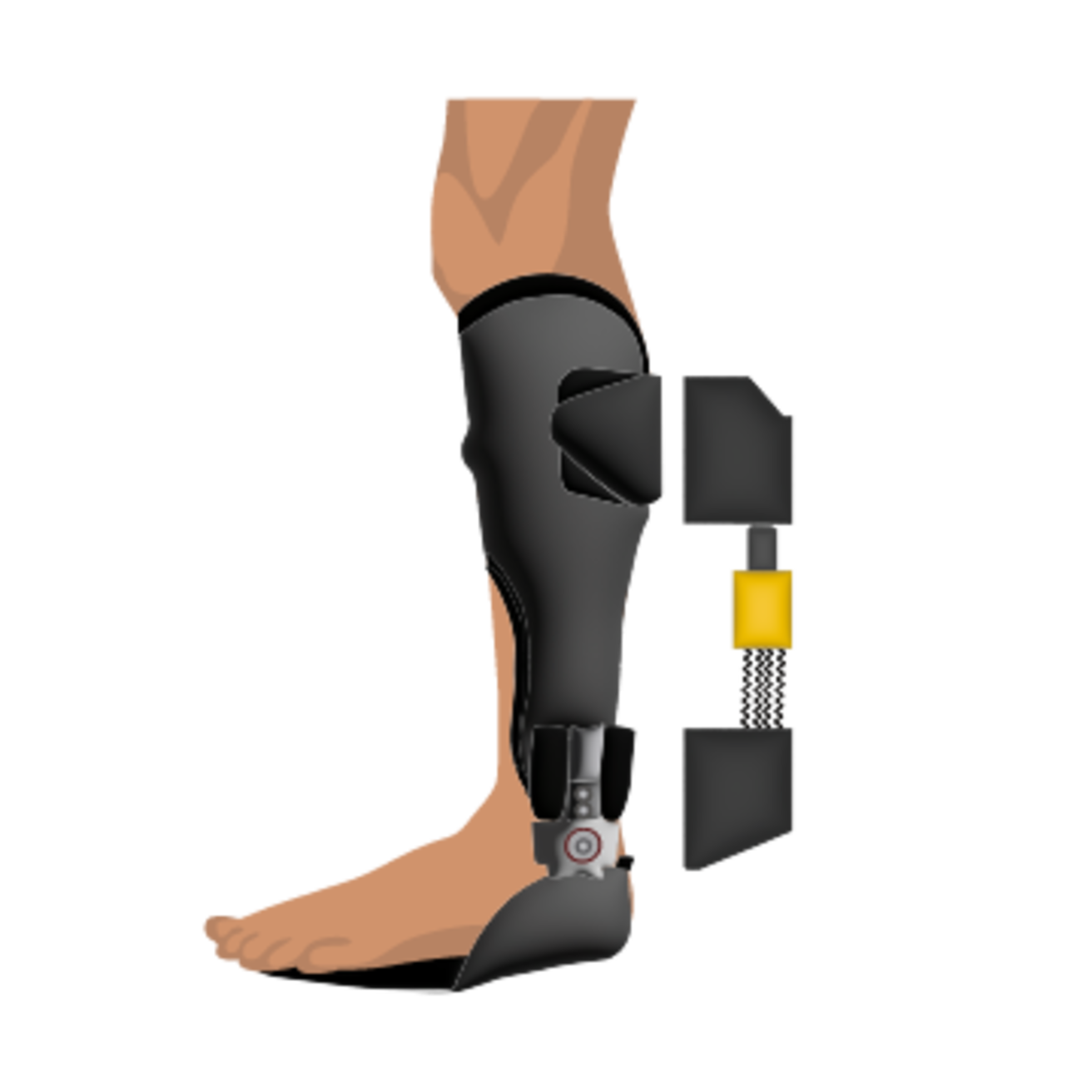
Powered Ankle-Foot Orthosis (AFO)
In this collaborative project, we combine our group’s expertise in biomechatronics with Prof. Caterina Lamuta’s innovations with artificial muscles, and Prof. Jason Wilken’s established expertise in clinical gait research to create an innovative powered ankle-foot orthosis smart device. With Integrated embedded sensors and human-in-the-loop control, the goals of the Powered AFO project are twofold: 1) allow out-of-the-lab study of ankle-foot orthosis properties and their effects on gait biomechanics, 2) create a light-weight, safe, effective, and low-cost assistive device for individuals with plantarflexor muscle weakness.
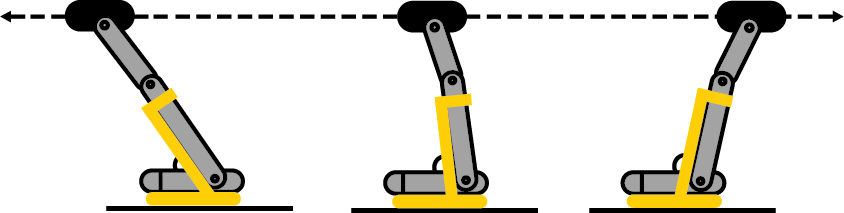
Mechatronic Systems for Measuring Ankle-Foot Orthosis Properties
The RAD lab designs and implements mechatronic bench-top testing devices to experimentally measure ankle-foot orthosis (AFO) properties, with a focus on sagittal-plane rotational stiffness. Our custom-made device, the AFO Stiffness Measurement Apparatus (SMApp), consists of a robotic surrogate foot and ankle joint. The SMApp dynamically flexes an AFO in the sagittal plane while collecting a time series of torque and ankle angle data. Stiffness is calculated as the slope of piece-wise linear-regressions of the torque-angle curve. There are several ongoing projects that involve this area of research, including a study of the effect of ankle center of rotation location on effective AFO stiffness, dynamic gait-profile trajectory emulation, multi-planar testing, MTP joint stiffness testing, and more.

Wrist-Hand Gesture Recognition
This project utilizes wearable sensors, including EMG and accelerometers, to accurately identify a range of hand gestures. Using a sophisticated machine learning model, it distinguishes between about ten different hand gestures, with the potential to enhance control of hand prosthetics for seamless human-machine interaction. This project is in collaboration with Prof. Rachel Vitali (HIR Lab).
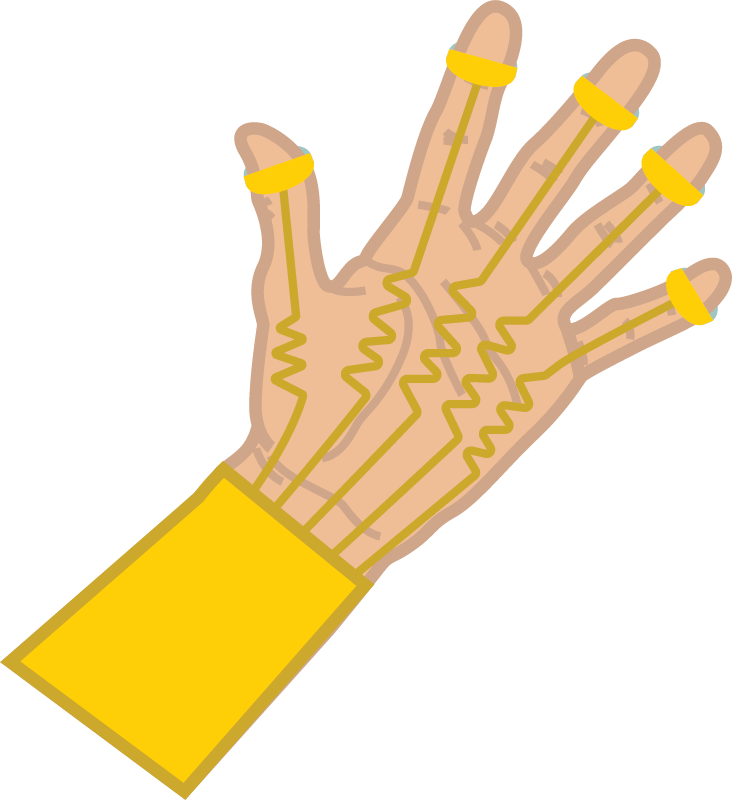
Wrist Exoskeleton for Remote Rehabilitation at Home
This project involves designing a soft hand-wrist exoskeleton, controlled by cable-driven actuators, to allow remote rehabilitation. A team of students from the Biomedical Engineering Senior Design class will be working on this project in 2023-2024.
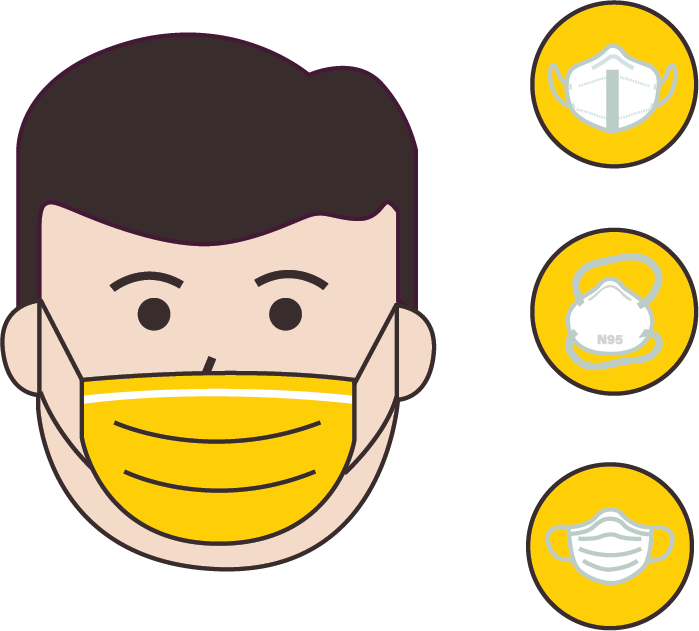
Effect of Face Masks on Jaw Tension
This study aims to investigate whether face masks have an effect on jaw muscle tension. Using non-invasive electromyography (EMG) sensors, we measure muscle activity from key orofacial and postural muscles involved in temperomandibular joint dysfunction and headaches while wearing different types of facemasks.
Student Projects
The Abel Table
The Abel Table is a project dedicated to designing an adaptive tool for wheelchair users to be comfortable at tables that might not otherwise accommodate them. Xandra Abel McGlasson was awarded a Creative Kickstart Grant from the Engineering Library to work on this project.